
I am a PhD candidate at the Center for Robotics and Institute of Geodesy and Geoinformation in the University of Bonn, Germany. I was a visiting PhD student in Oxford DRS-P and UCL RPL. I obtained my Master’s degree in Navigation, Guidance, and Control and my Bachelor’s degree in Navigation Engineering at Wuhan University, Wuhan, China, in 2020 and 2017, respectively.
My research interest focuses on sensor fusion-based robot perception and navigation. I am looking for self-motivated Master students (online/offline) to work on topics about visual-language-navigation, mobile manipulation, etc. Please drop me an email if you are interested.
🔥 News
- 2026.02: 🎉🎉 We are organizing the 1st Workshop on Robot Meets GNSS and Ranging for Seamless Autonomy in ICRA 2026.
- 2026.01: 🎉🎉 I defended my PhD thesis with the highest distinction “Summa Cum Laude”.
- 2026.01: 🎉🎉 I am glad to serve as an Associate Editor of IROS 2026.
- 2025.06: 🎉🎉 Very excited that I have started a joint research exchange program with Prof. Maurice Fallon at the University of Oxford and Prof. Dimitrios Kanoulas at the University College London.
- 2025.06: 🎉🎉 Our DogLegs paper has been accepted to IROS2025.
- 2025.05: 🎉🎉 Very happy to visit the SLAM Lab at the University of Zaragoza and the Institut de Robòtica i Informàtica Industrial (IRI), Spain, and give a talk there. Thanks to Prof. Javier Civera and Dr. Joan Solà for hosting me!
- 2025.03: 🎉🎉 Checkout our new preprint on multiple leg-mounted IMUs-based proprioceptive state estimation for legged robots (DogLegs)!
- 2025.01: 🎉🎉 A paper on GNSS/INS integrated navigation system with a wheel-mounted IMU (Wheel-GINS) has been accepted to IEEE Transactions on Intelligent Transportation Systems!
- 2024.10: 🎉🎉 Very happy to visit the Smart Robotics Lab at TUM and give a talk there. Thanks to Prof. Stefan Leutenegger for hosting me!
- 2024.02: 🎉🎉 A paper on EKF-based high-frequency LiDAR-inertial odometry (LIO-EKF) has been accepted to ICRA. Try the code!
- 2023.10: 🎉🎉 A completely new version of the Wheel-INS code supporting both Linux and Windows is released! Check it out!
- 2023.02: 🎉🎉 I am invited by CVlife to give an online presentation about my research on Wheel-IMU. Check out the video in Bilibili! (in Chinese)
- 2022.11: 🎉🎉 A paper on one wheel-mounted IMU-based SLAM (Wheel-SLAM) has been accepted to IEEE Robotics and Automation Letters.
- 2022.11: 🎉🎉 A paper on multiple IMUs-based wheeled robot localization (Wheel-INS2) has been accepted to IEEE Transactions on Intelligent Transportation Systems.
📝 Publications
Journal papers
Wheel-GINS: A GNSS/INS Integrated Navigation System with a Wheel-mounted IMU [PDF] [Code]

Yibin Wu, Jian Kuang, Xiaoji Niu, Cyrill Stachniss, Lasse Klingbeil, and Heiner Kuhlmann, IEEE Transactions on Intelligent Transportation Systems, 2025.
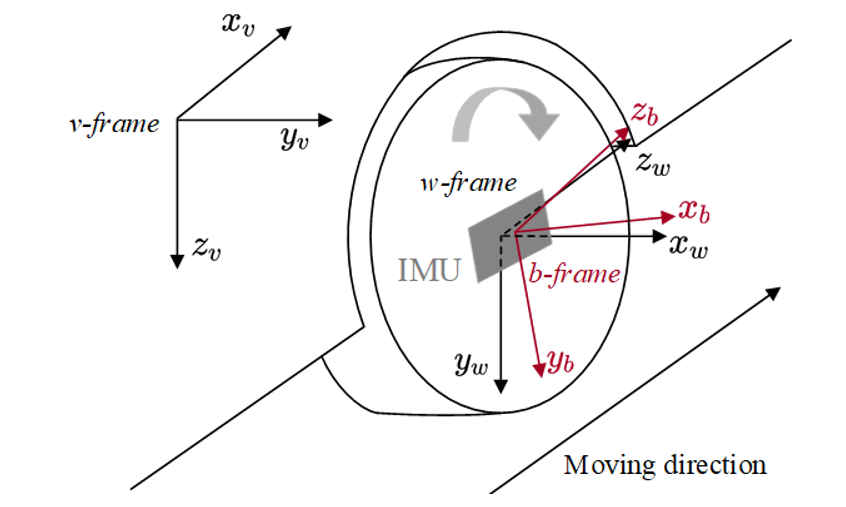
- Wheel-GINS is an integrated navigation system that combines GNSS data with a wheel-mounted IMU (Wheel-IMU). It performs a similar information fusion process to conventional GNSS/Odometer/IMU integrated systems using only two sensors. Moreover, all Wheel-IMU installation parameters are estimated online in Wheel-GINS, enhancing the system’s practicality and adaptability.
Wheel-SLAM: Simultaneous Localization and Terrain Mapping Using One Wheel-mounted IMU [PDF] [Code]

Yibin Wu, Jian Kuang, Xiaoji Niu, Jens Behley, Lasse Klingbeil, and Heiner Kuhlmann, IEEE Robotics and Automation Letters, 2022.
- A SLAM system using only one low-cost IMU by exploiting the road bank angles (mirrored by the robot roll angles estimated by Wheel-INS) as terrain features to enable the loop closure with a Rao-Blackwellized particle filter. The weights of the particles are updated according to the difference between the currently estimated roll sequence and the terrain map.
Wheel-INS2: Multiple MEMS IMU-based Dead Reckoning System with Different Configurations for Wheeled Robots [PDF]
Yibin Wu, Jian Kuang, Xiaoji Niu, IEEE Transactions on Intelligent Transportation Systems, 2022.
- A multiple IMUs-based localization system for wheeled robots by obtaining different dynamic information of the vehicle and taking advantage of the relative spatial constraints among the inertial sensors with a comparison of various configurations, e.g., one body-mounted IMU (Body-IMU) plus one wheel-mounted IMU (Wheel-IMU), dual Wheel-IMUs, and dual Wheel-IMUs plus one Body-IMU.
A Comparison of Three Measurement Models for the Wheel-mounted MEMS IMU-based Dead Reckoning System [PDF]
Yibin Wu, Xiaoji Niu, Jian Kuang, IEEE Transactions on Vehicular Technology, 2021.
- A thorough and complete comparison of three different measurement models (vehicle velocity information obtained from the wheel-mounted IMU) in Wheel-INS with both theoretical analysis and experimental illustration.
Wheel-INS: A Wheel-mounted MEMS IMU-based Dead Reckoning System [PDF] [Code]

Xiaoji Niu, Yibin Wu, Jian Kuang, IEEE Transactions on Vehicular Technology, 2021.
- A robust and accurate localization system for the wheeled robots using one low-cost wheel-mounted IMU by taking advantage of rotation modulation.
-
A MEMS IMU and motion constraint-based positioning algorithm for shared bicycles, Xiaoji Niu, Longyang Ding, Jian Kuang, Yibin Wu (Corresponding author), Journal of Chinese Inertial Technology, 2021 (in Chinese)(Longyang Ding was an undergraduate student supervised by me. He won the Special Prize of the 12th China Undergraduate Contest on Surveying & Mapping Technical Paper based on this project.) [PDF]
-
Artificial Marker and MEMS IMU-Based Pose Estimation Method to Meet Multi-rotor UAV Landing Requirements, Yibin Wu, Xiaoji Niu, Junwei Du, Le Chang, Hailiang Tang, Hongping Zhang, Sensors, 2019 [PDF]
Conference papers
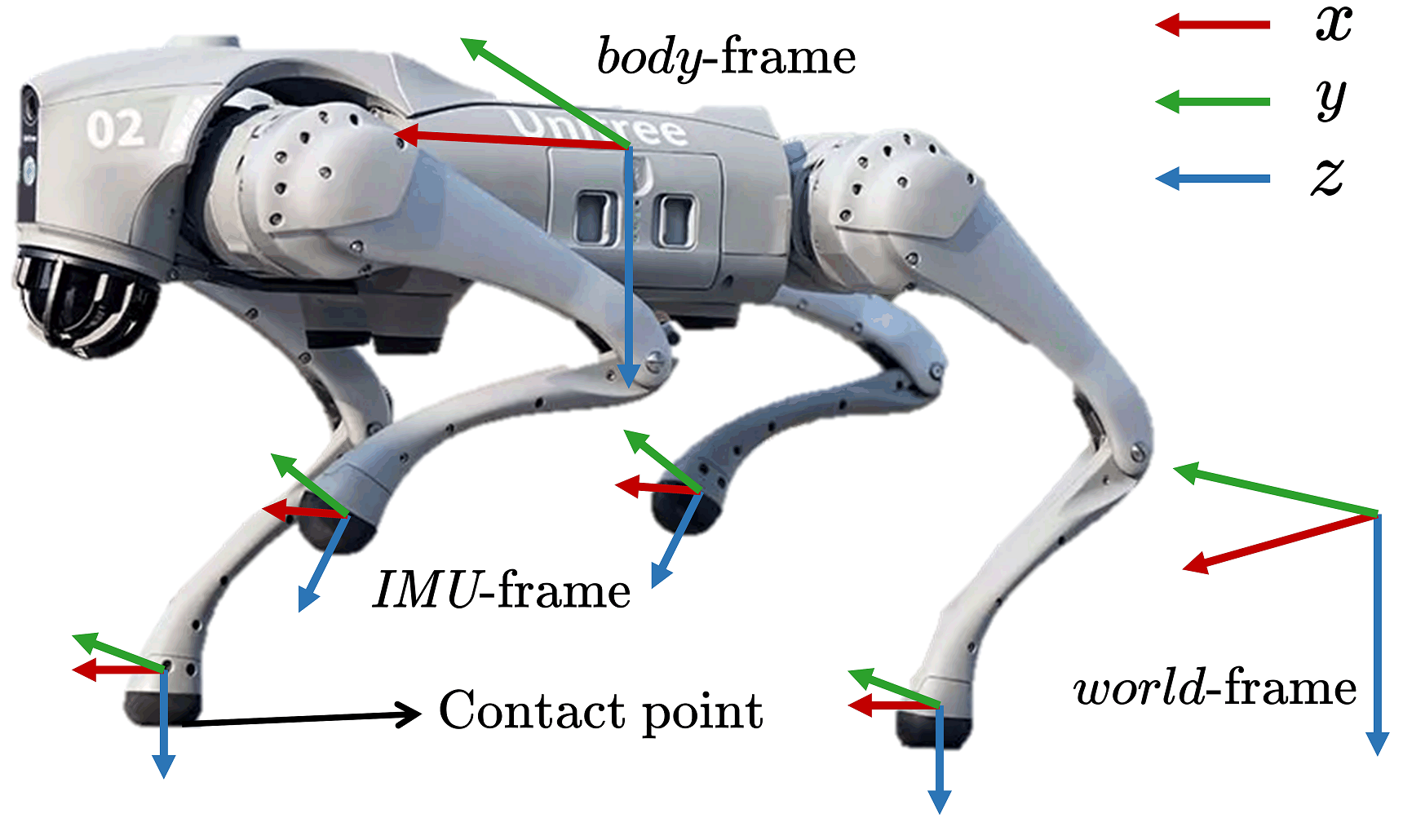
DogLegs: Robust Proprioceptive State Estimation for Legged Robots Using Multiple Leg-Mounted IMUs [PDF] [Code]

Yibin Wu, Jian Kuang, Shahram Khorshidi, Xiaoji Niu, Lasse Klingbeil, Maren Bennewitz, and Heiner Kuhlmann, IROS 2025.
- A state estimation system for legged robots that fuses the measurements from a body-mounted IMU, joint encoders, and multiple leg-mounted IMUs (Leg-IMU) using an EKF.
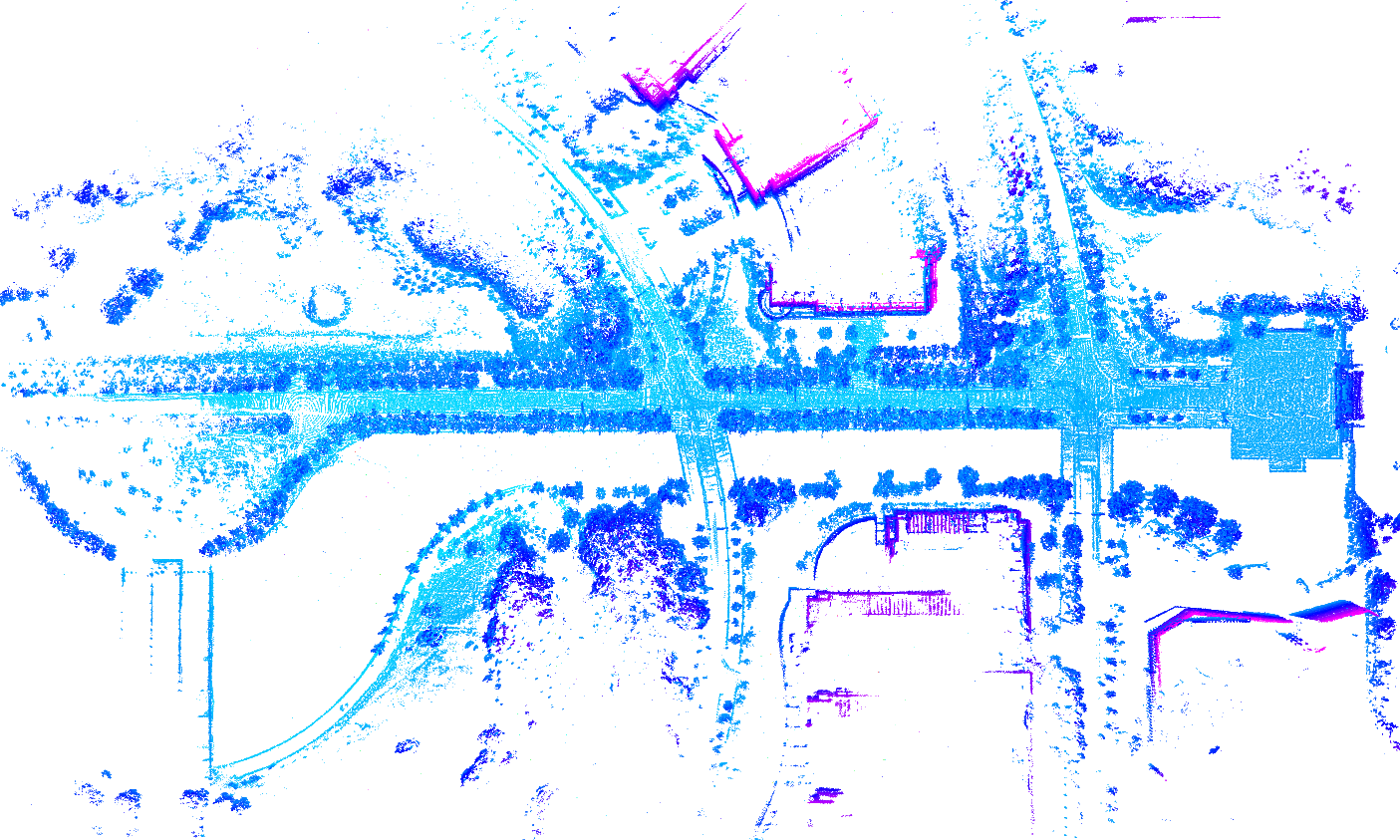
LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters [PDF] [Code]

Yibin Wu, Tiziano Guadagnino, Louis Wiesmann, Lasse Klingbeil, Cyrill Stachniss, and Heiner Kuhlmann, ICRA, 2024.
- A high-frequency LiDAR-inertial odometry system based on adaptive point-to-point registration and EKF, achieving comparative accuracy to the state-of-the-art.
Preprints
- Formula Derivation and Analysis of the VINS-Mono, Yibin Wu, 2019 (A detailed and comprehensive formula derivation of VINS-Mono, one of the state-of-the-art visual-inertial odometry systems.)
🎖 Honors and Awards
- 2023.10 Second Place in the ICCV 2023 SLAM Challenge (LiDAR-Inertial Track)
- 2020.05 Outstanding Master Graduate of Wuhan University
- 2019.12 Outstanding Postgraduate Student of Wuhan University
- 2019.08 First prize (1.97%) and Best Paper Award (0.41%) in the 14th China Graduate Electronic Design Competition
- 2019.08 Third prize in the 6th China Graduate Contest on Smart-city Technology and Creative Design
- 2016.12 National Encouragement Scholarship (Undergraduate) of China
💻 Internships
- 2018.09 - 2018.12, Research Intern in the HD map group at Momenta, Beijing, China.
🙋♂️ Academic Services
- Associate Editor: IROS 2026
- Journal reviewer: IEEE T-RO, IEEE T-ITS, IEEE T-ASE, IEEE T-SP, IEEE T-VT, IEEE RA-L, Information Fusion(Elsevier), Measurement (Elsevier), IEEE Sensors-J
- Conference reviewer: ICRA, IROS, RSS
- Workshop Organizer: Workshop on Robot Meets GNSS and Ranging for Seamless Autonomy in ICRA 2026
⛰️ Misc
- 🏃🏼 I finished a full marathon in the Berlin Marathon 2023.
- 📸 I am a contracted photographer with Visual China Group.
- 🏂 I like hiking and snowboarding.